
One Stop BIM Solution
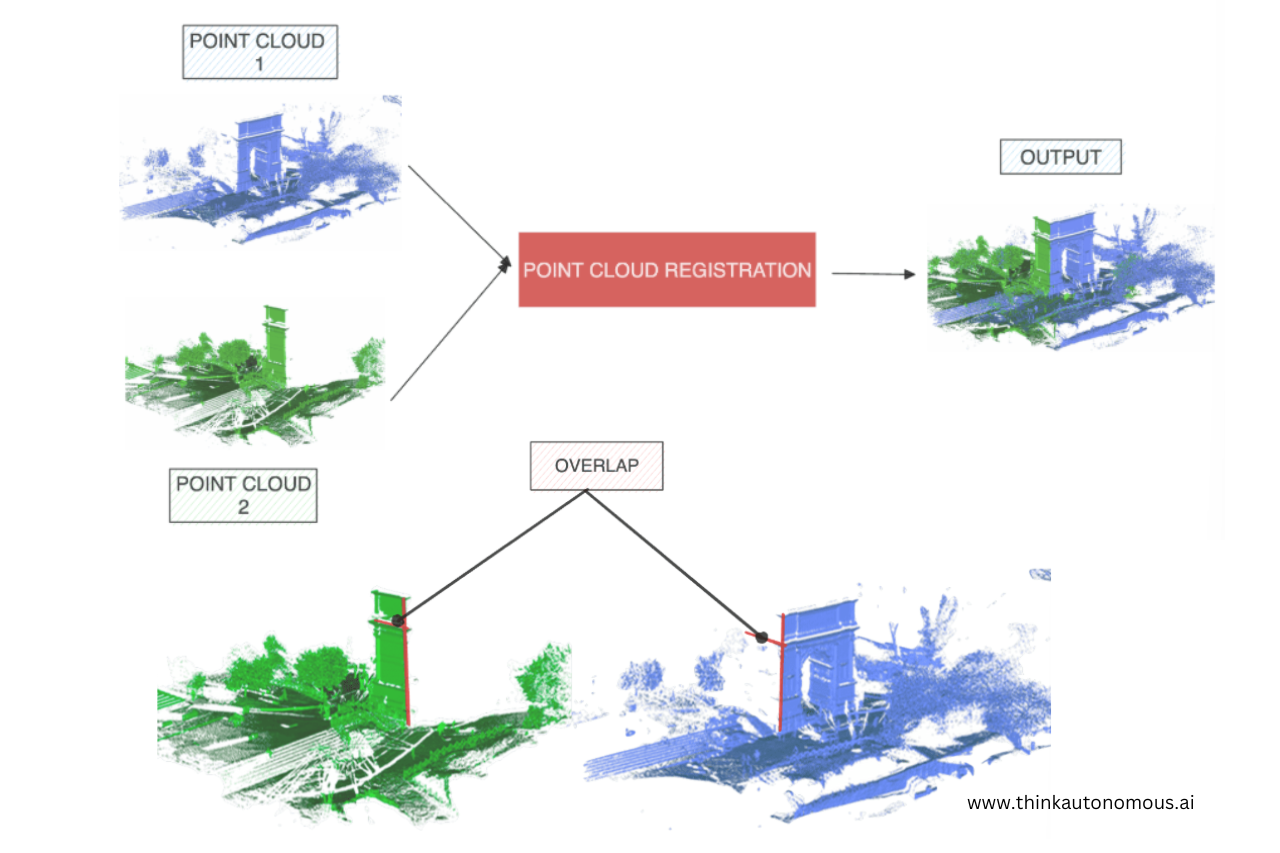
In Scan to BIM, we may have several separate point clouds. For example, we measure on two different sides, or when doing SLAM. Then how to make it into a whole model? Before modeling, we need to combine the point clouds into a single, unified point cloud. This process is called Point Cloud Registration. Point Cloud Registration is the process of aligning two or more sets of points together before modeling. Point Cloud Registration is not as easy as just combining. There are certain steps so that all data is aligned or arranged with precision.
Popular Point Cloud Registration Methods
-
Target-Based Registration
This method uses targets i.e. points with known coordinates to perform registration. The target is placed at a location with known coordinates and moved with the object to be scanned. The placement of the target must be careful because the position of the target is used as a reference for registration.
-
Feature-Based Registration
This method utilizes unique features, such as building corners or edges that can be used as a reference for merging. In this method, the algorithm looks for correspondences between corresponding feature points in both data.
-
Cloud to Cloud
This method performs direct registration between point clouds. This method utilizes advanced algorithms, but is prone to noise and errors.
-
Hybrid
Combines all methods to get accurate results.
Point cloud registration is a crucial stage in the Scan to BIM workflow. Without proper registration, the point cloud data will become poorly connected pieces, which will ultimately affect the accuracy of the resulting BIM model. By understanding the various registration methods - from target-based to hybrid - we can choose the best approach according to project needs and field conditions.
